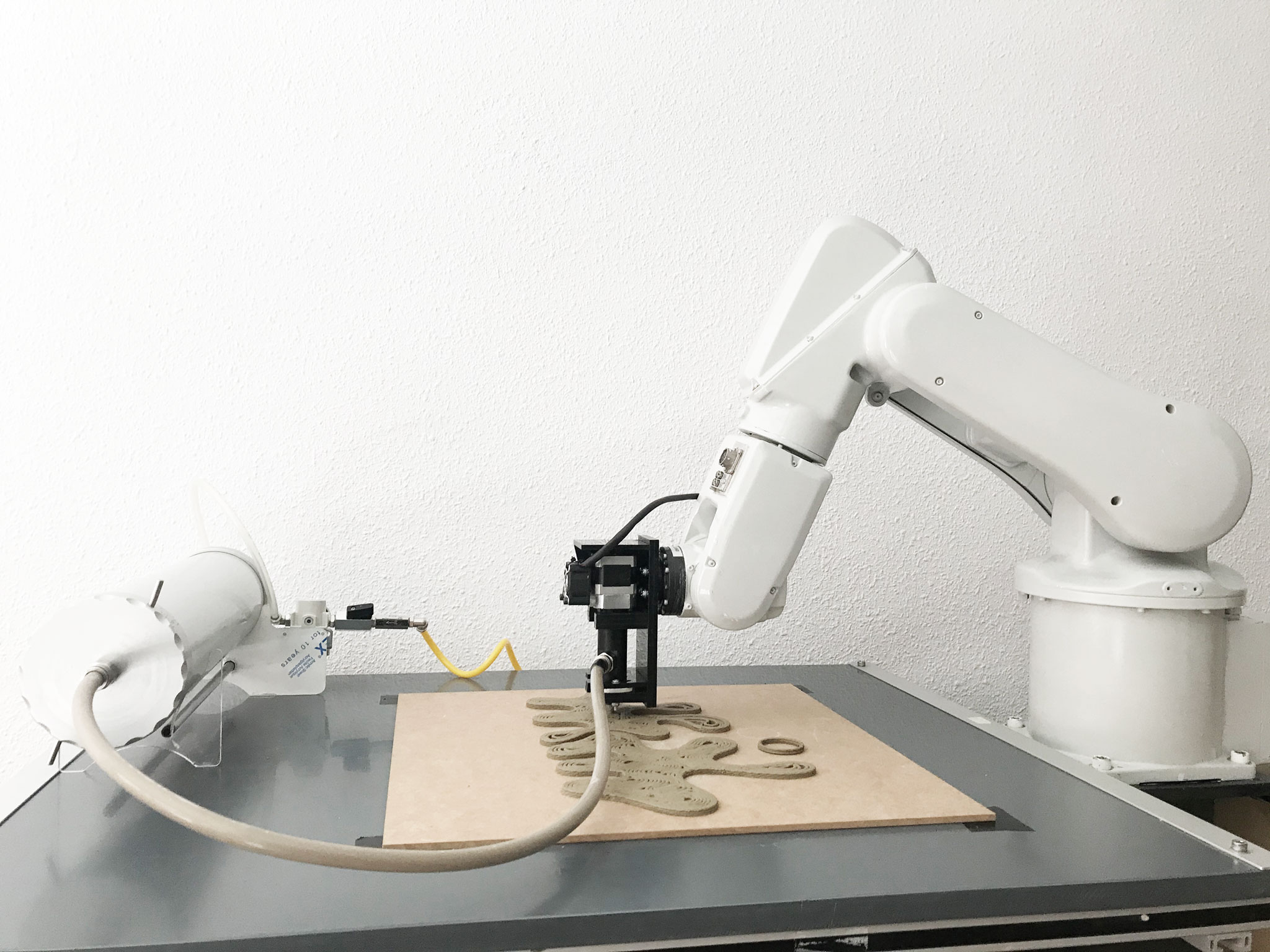
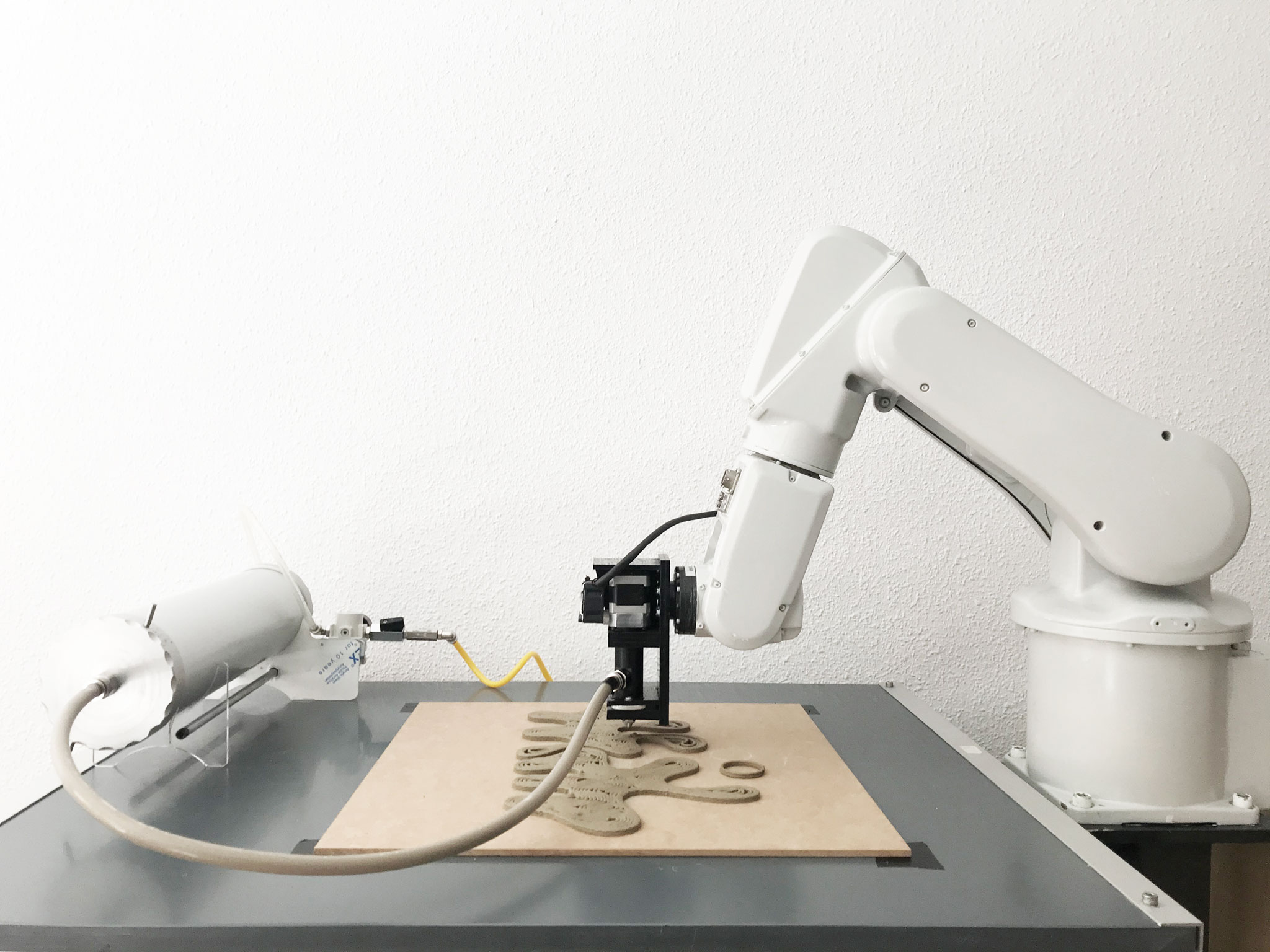
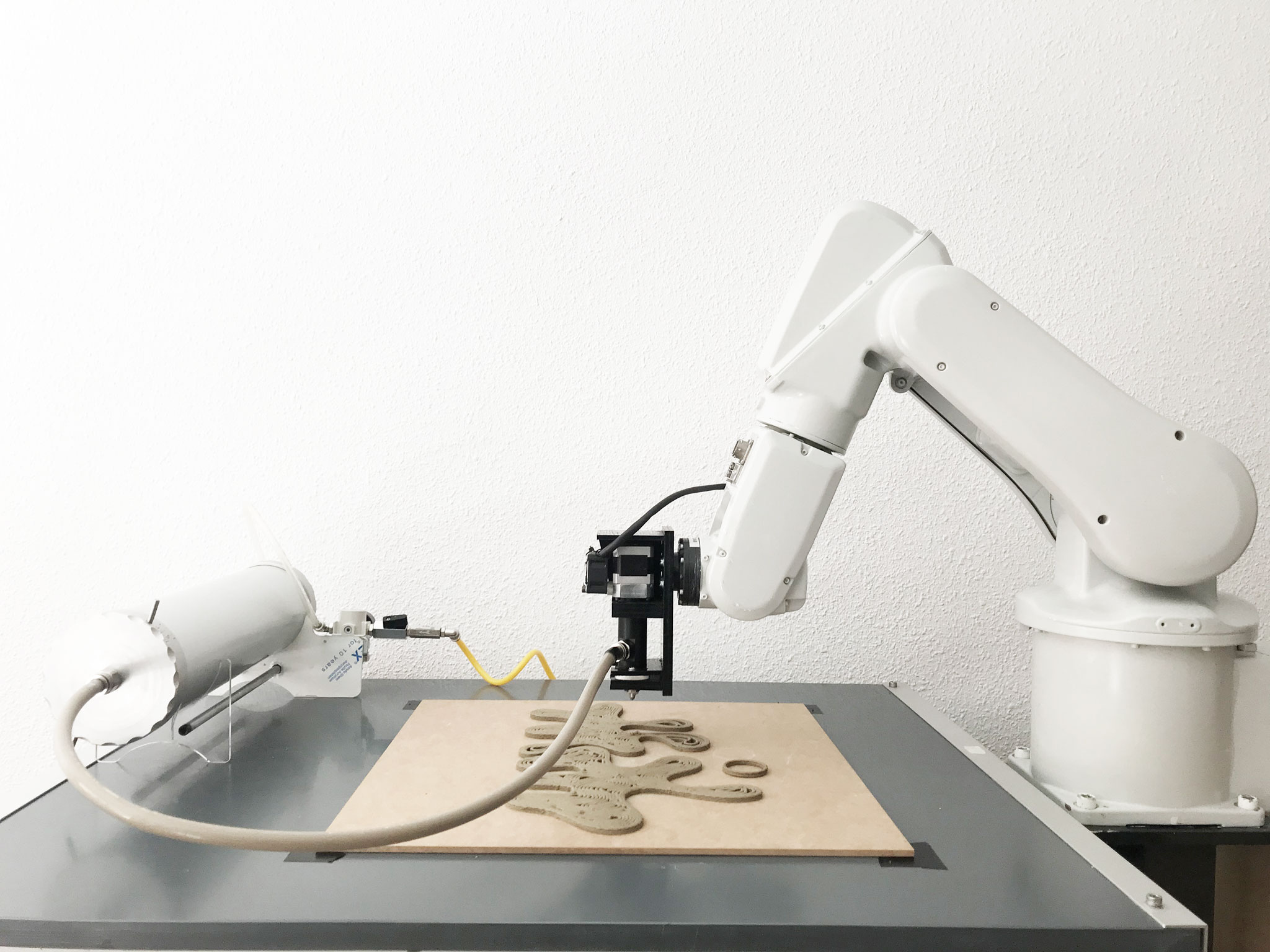
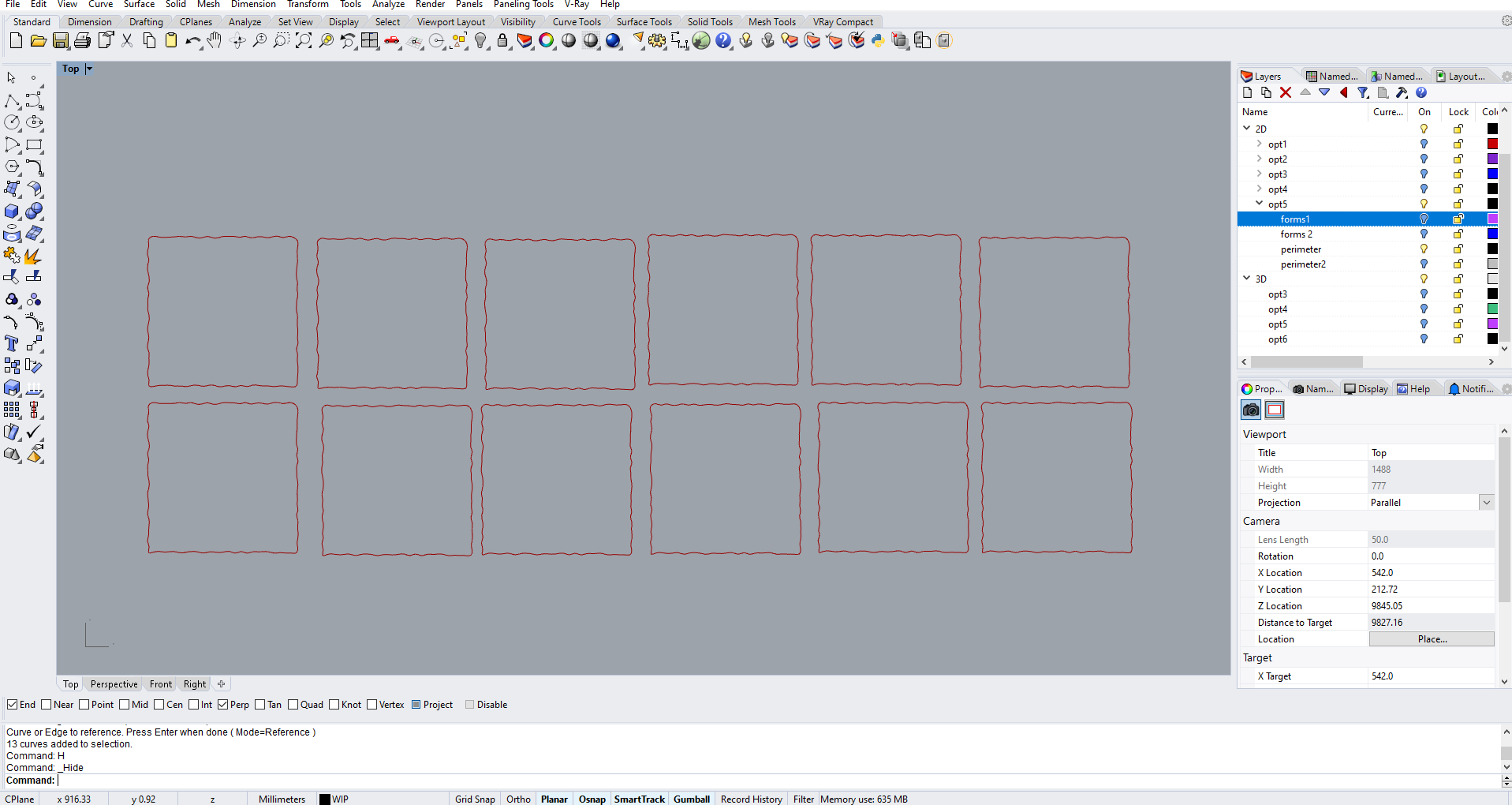
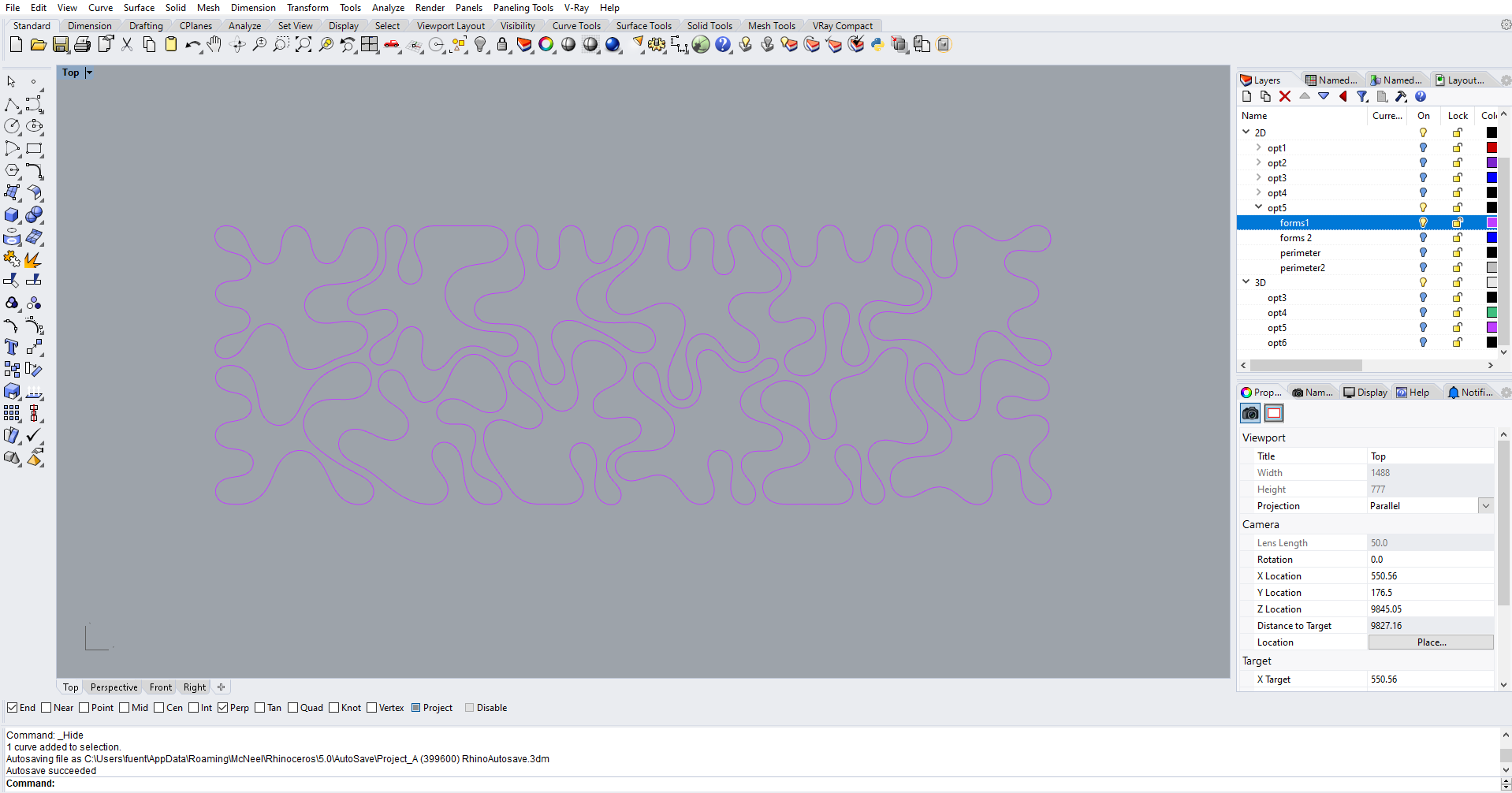
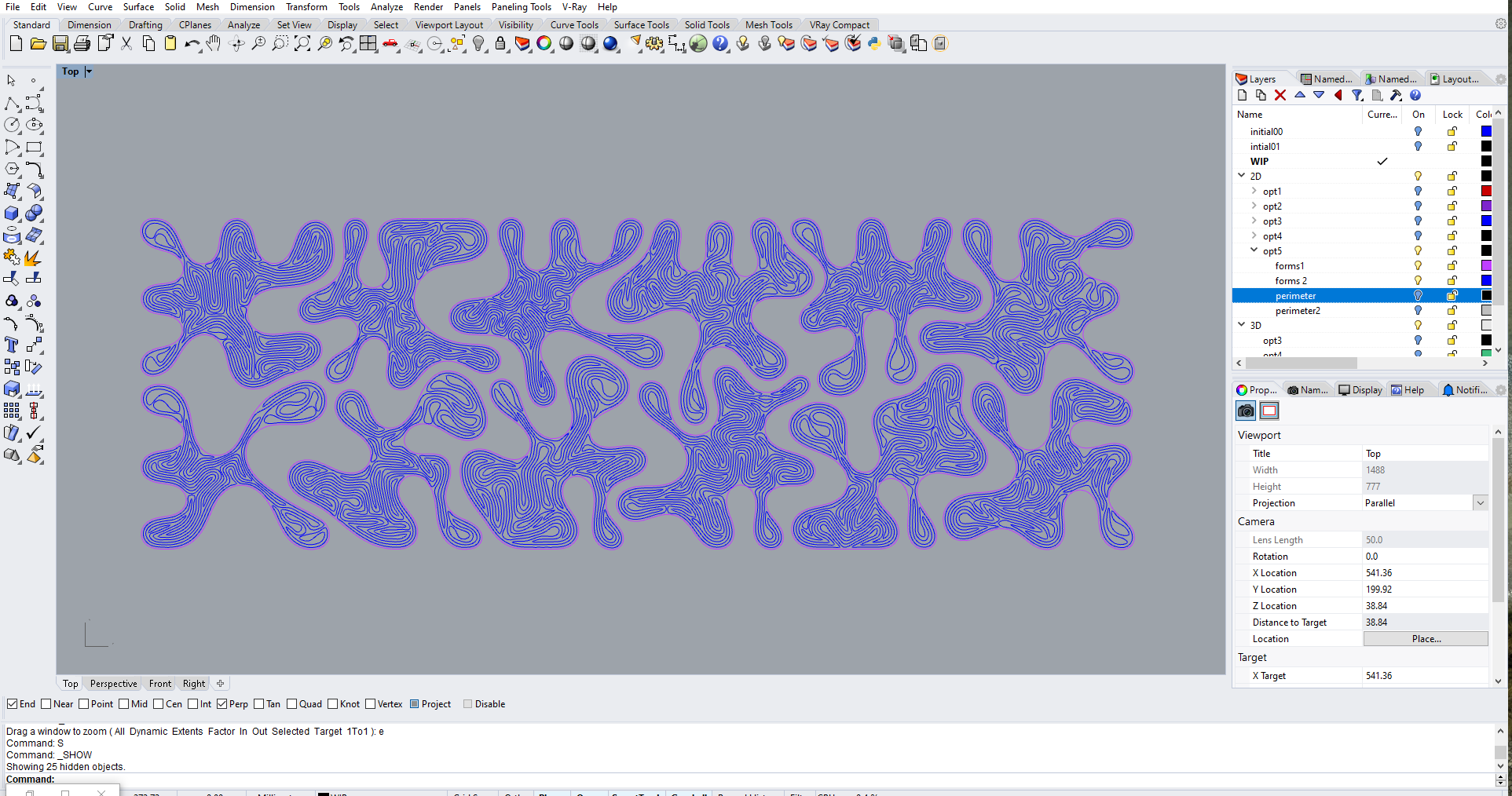
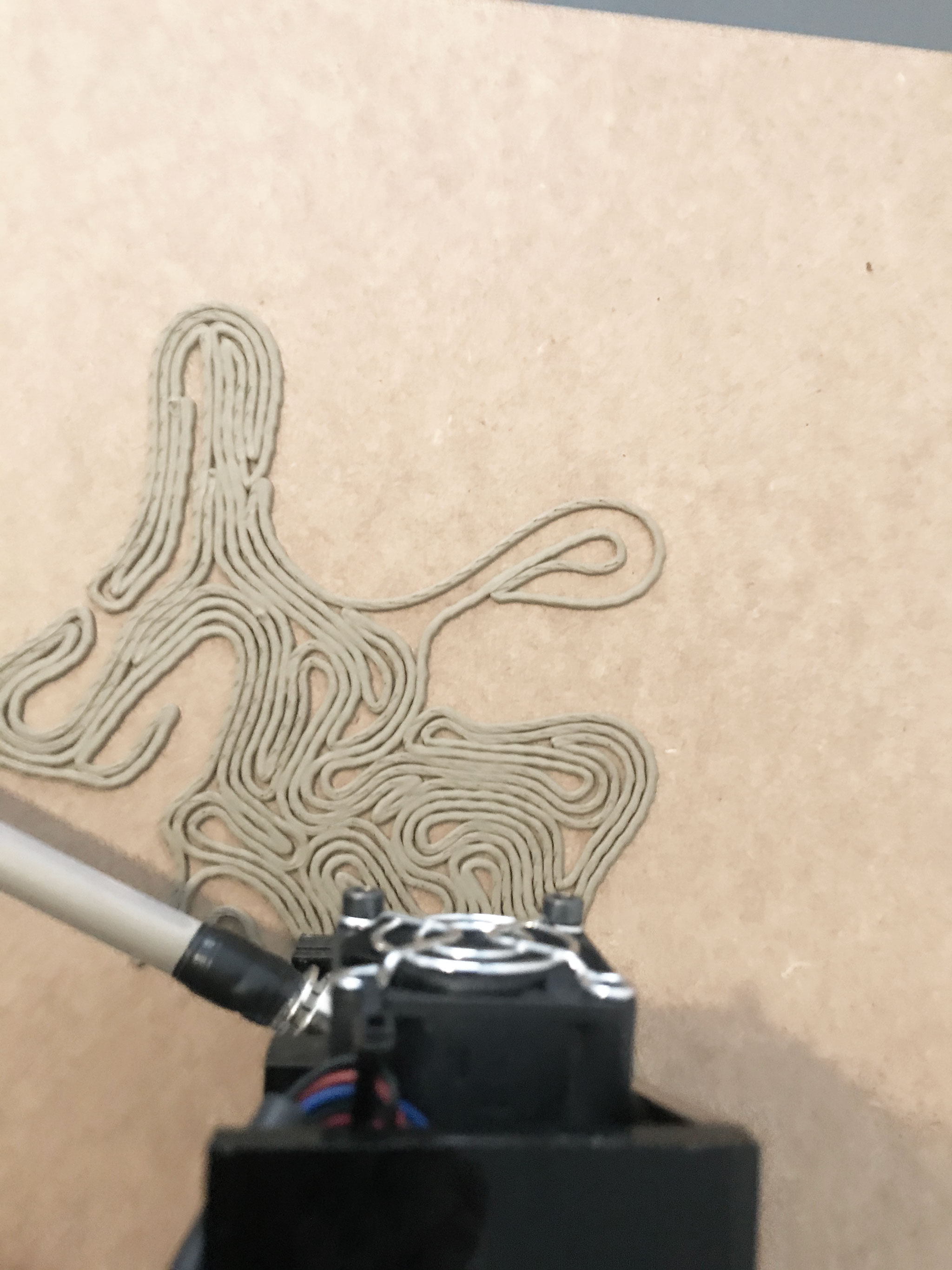
Robotics Tile Printing Project is a direct commission from Porcelanosa Grupo to produce a concept design for a robotics tile system construction. The project tries to preserve the logic and standardization protocols of the tiling construction systems. However, It seeks to reveal the natural expression of the construction process and the characteristics of the material itself.
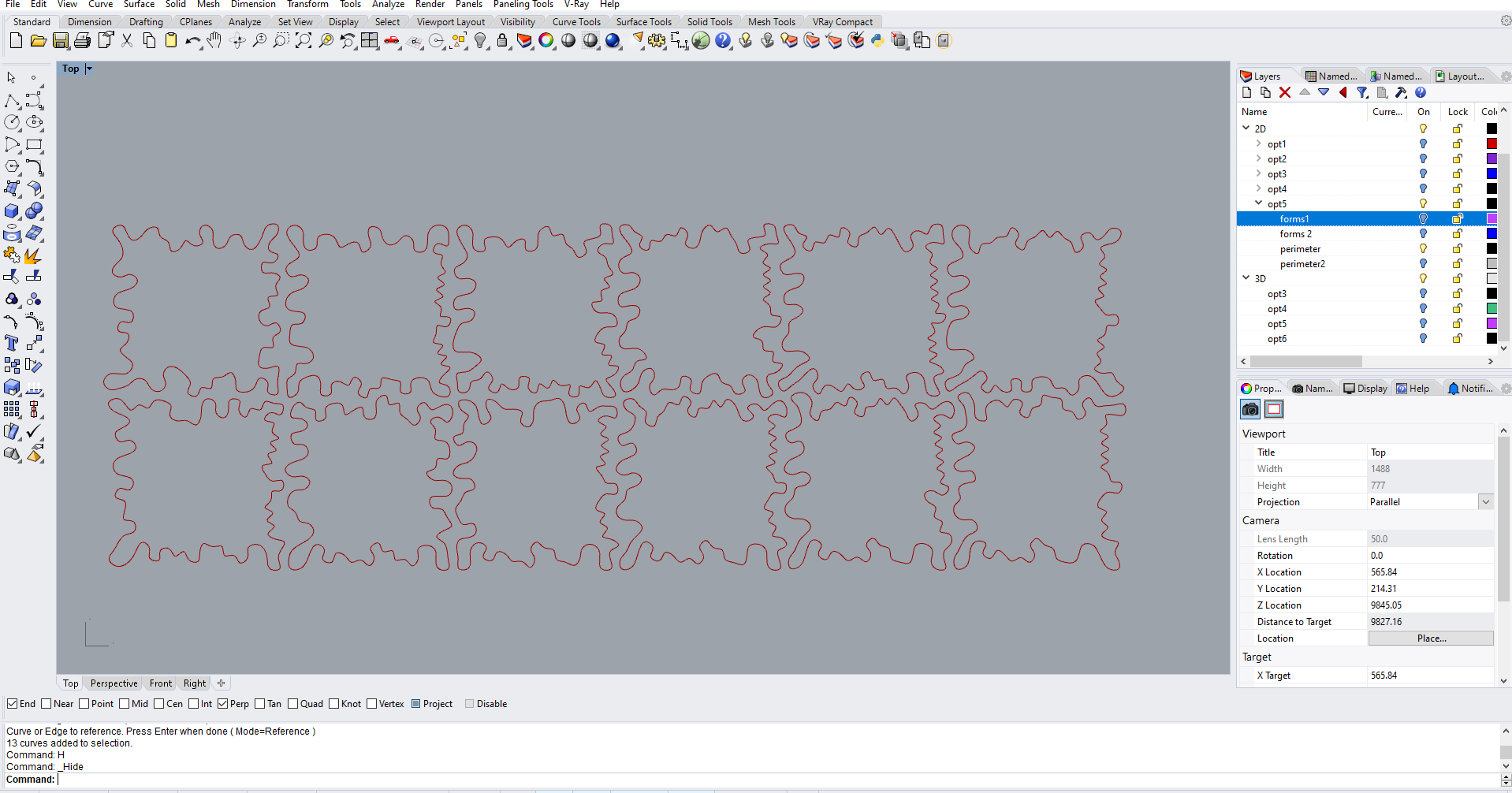
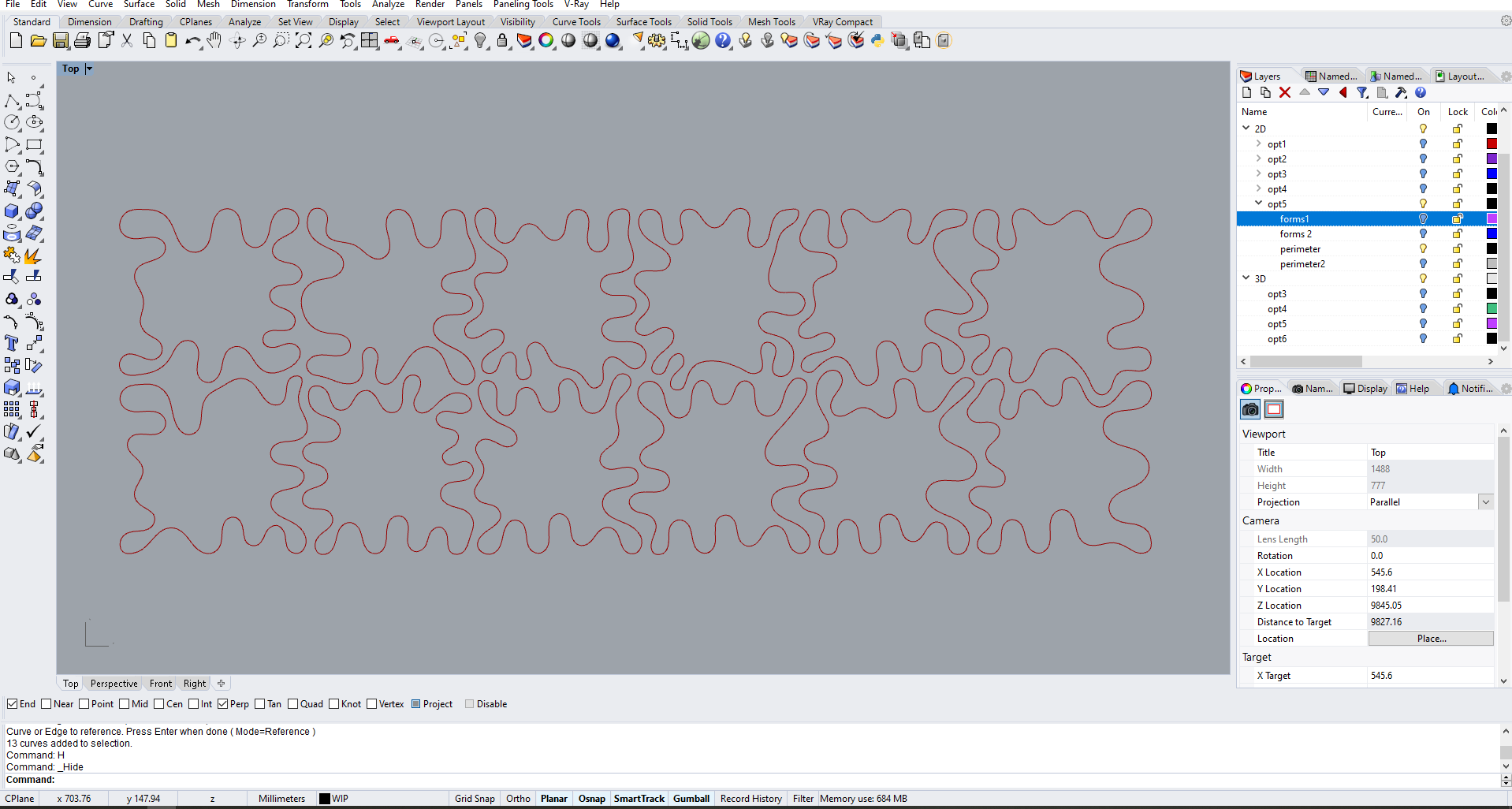
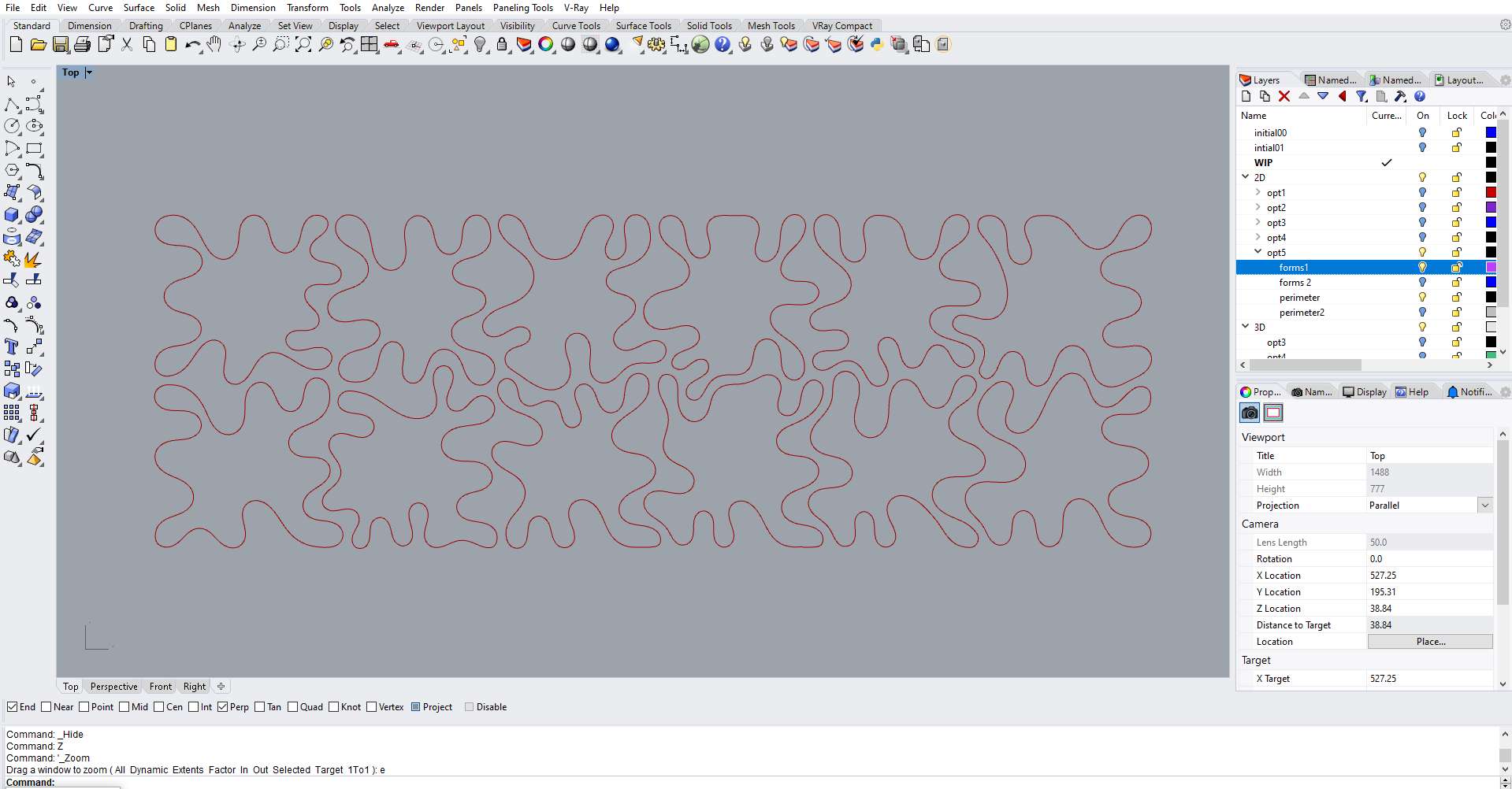
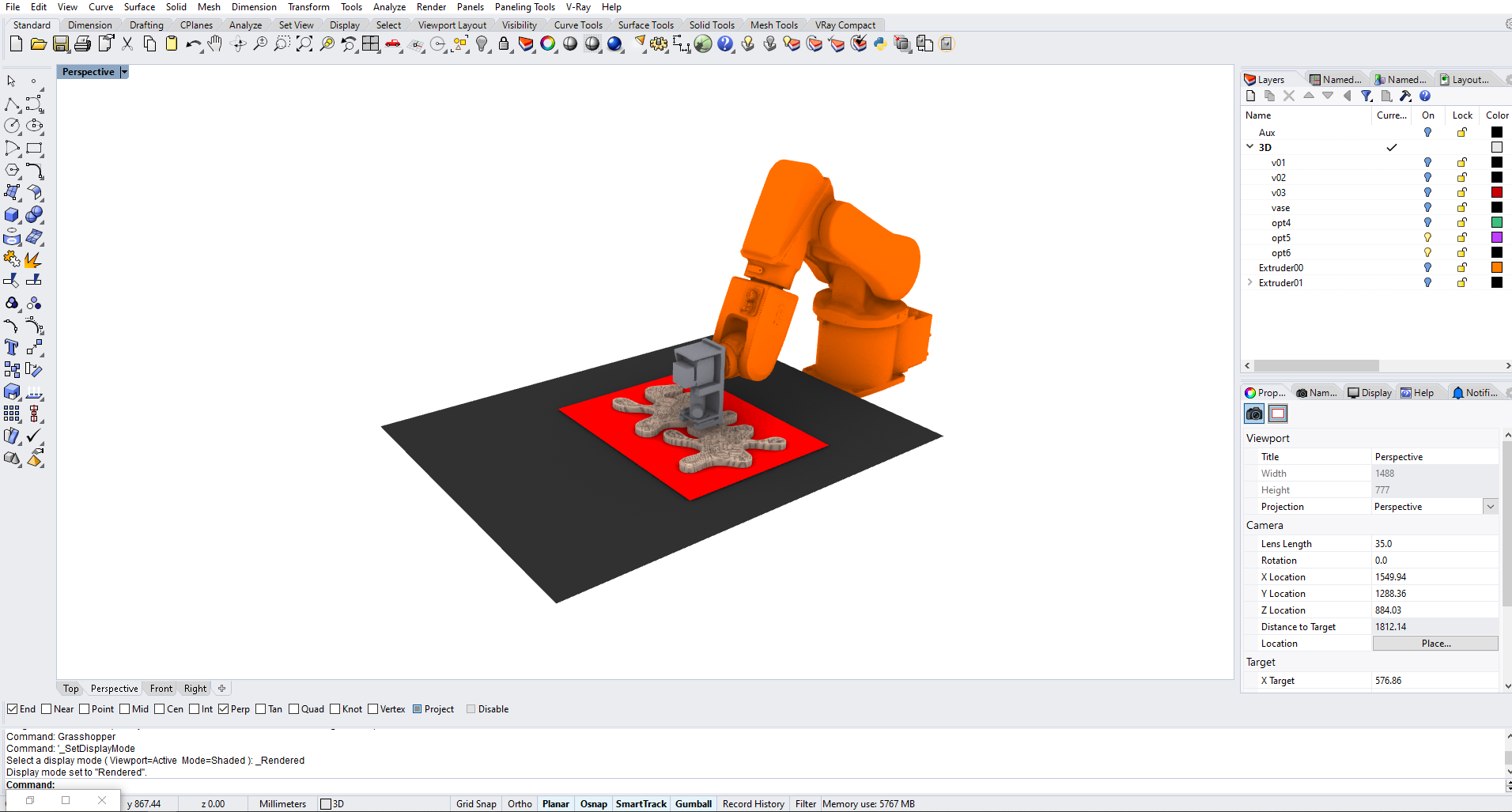
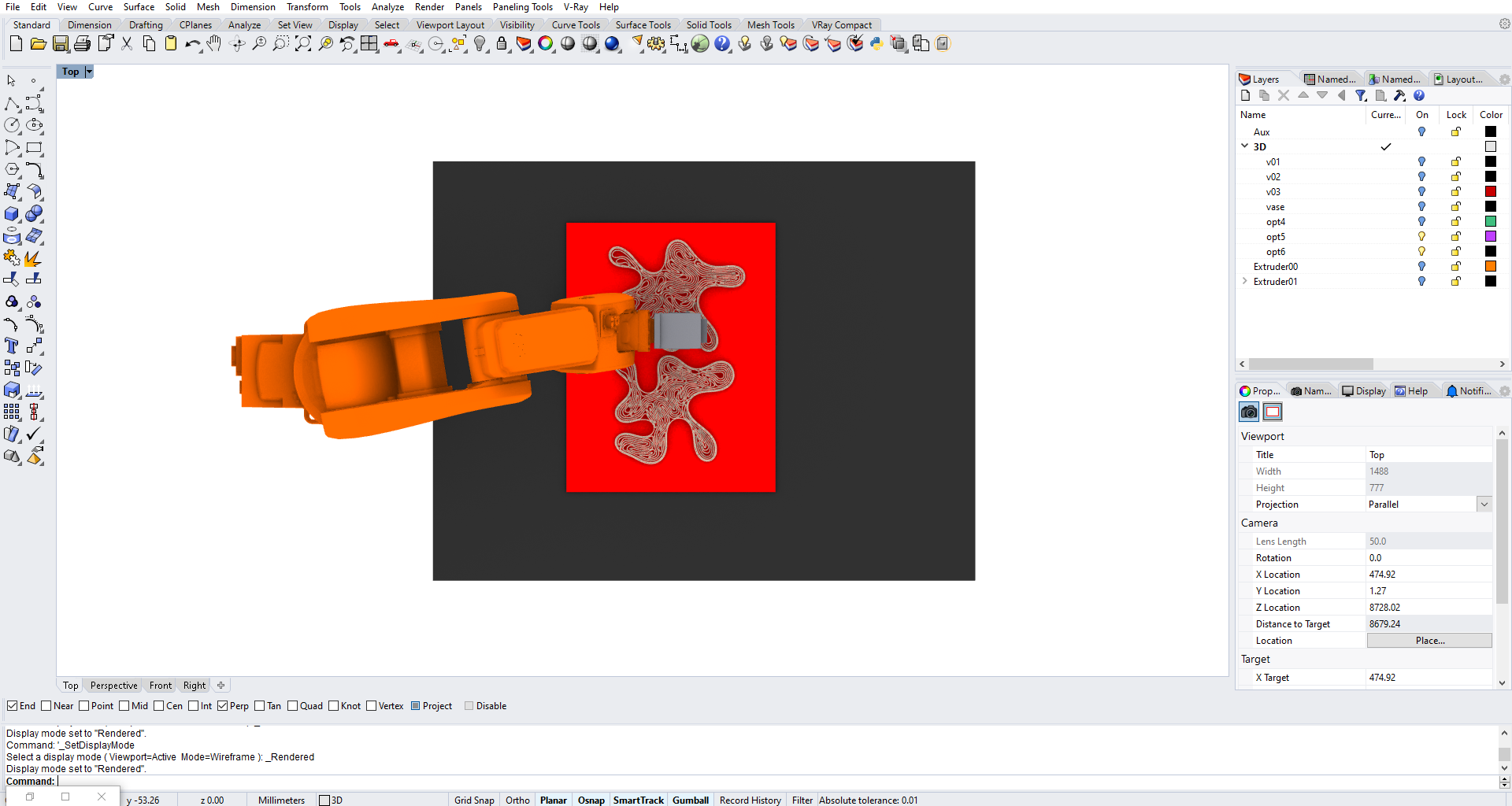
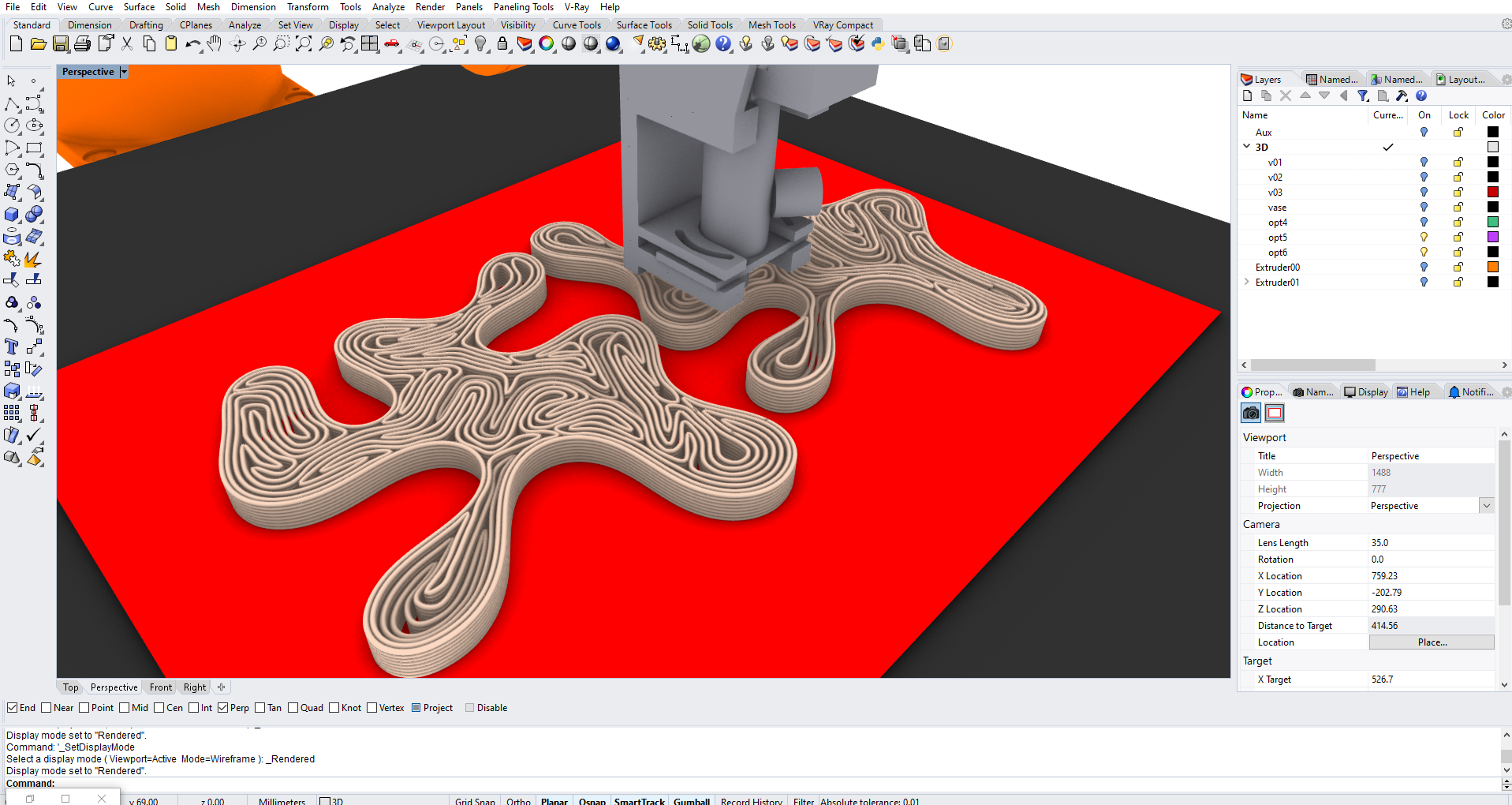
The result is a set of 3D clay printed pieces, each one different from the rest, but all of them are related and influenced by the neighbour modules. The overall result maintains the same logic, principles, and vocabulary producing individual & unique pieces on a broader complex assemblage.
This project is related to Robotics Clay Printing Project and is part of the development process and continuous work of Archiologics